On Saturday, February 24th 2024, the ECTS CMP crew participation in our very first VEX competition at Harborcreek Highschool. We had 2 teams/robots, one for AM (Zeph Burek, Arlo Russel, Frankie Trigilio, Walker Owens), and one for PM (William Downey, Zac Long, Liam Schroeck).
We knew going into this that the competition was going to be difficult and this was going to be a learning experience, and it certainly was. I could not be more proud of how well both groups handled the many challenges throughout the day and how well they adapted as each challenge emerged. We did not end up in the top list of performers, as expected, but we did have fun and learned a ton, which was the goal for this first necessary step.
Note: The game this year was “Over Under”, and I strictly required that the teams build the VEX “recommended” robot for the competition, the 23-24 Hero Bot (the “Striker”): https://kb.vex.com/hc/en-us/articles/15962639615764-Getting-Started-with-VRC-23-24-Robot-Design-Over-Under
Here’s an article with a few notes that led up to this.
How the day worked:
The day started at about 8:30 with check in, there were 35 teams in total. At about 9:30 qualification rounds started, where teams were paired up at random and pitted against another pair of teams. In the qualification round, each team competed 6 times, with a different partner team each time. The qualification rounds took up most of the day, wrapping up with all teams ranked from 1-35 at about 2pm. Both teams were ranked in the 20s at this point. Between rounds, the teams used the time to repair the robots if needed and discuss strategy when possible.

Once teams were ranked, the top 16 were allowed to choose their alliance with another team. They were free to pick another team in the top 16, and when that happened, the next highest team was added to the group that was able to select a partner. Once 16 alliances were created, there was a single elimination playoff tournament to find a winner. Both teams played in the playoffs, but did not advance…again, this was expected for our first time. Many teams complemented the groups on how well they performed, especially for never being in a competition before (I also received a lot of compliments to pass along from other coaches…nice work guys!).
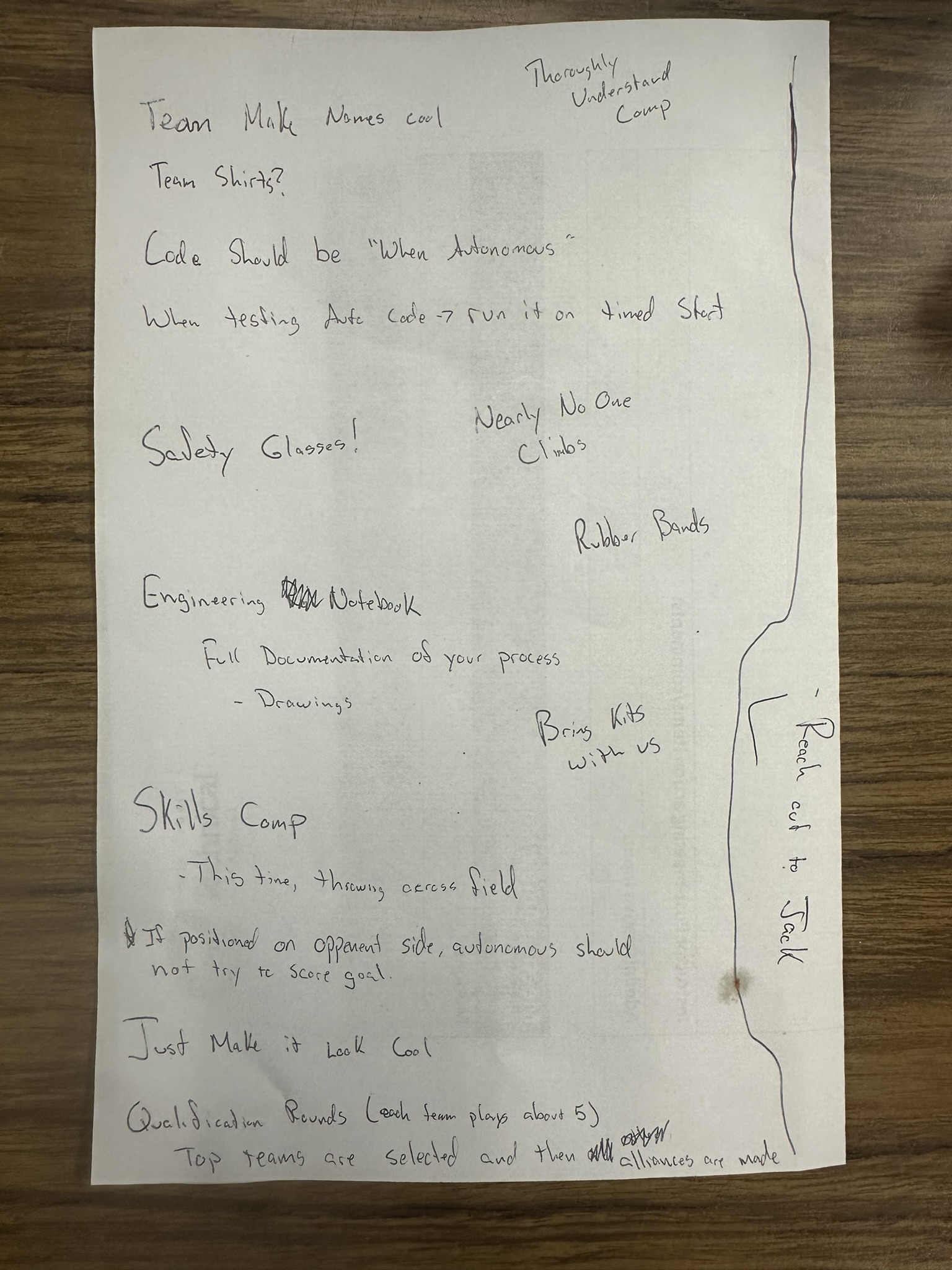
My Notes from the Day
Again, the goal of this day was to learn so that we would feel more prepared the next time we enter a competition (which may not be until next year, which will be a new game).
Game Notes
- The robot builds: As mentioned, I required the groups to build the “Hero Bot” that was recommended by VEX because I wanted to make sure we had something that was appropriate for the Over/Under game. After experiencing the competition for a bit, I started to regret that. It wasn’t that the builds were inappropriate, but the recommended build could not compete with the other custom builds. More importantly, I think the whole thing would have been even more fun if the robots we had were the brain children of the students entirely.
- Team names: This one’s on me. I just had our names as ECTS-1 and ECTS-2. I probably should have named them Guinea Pig 1, and Guinea Pig 2…In the future, again, just to add to the fun and student ownership, I should allow the students to name their teams themselves.
- Inspection: Before all games, robots must be inspected to make sure they are within size constraints and the autonomous code is legal. We had our code programmed to run on start. We had to go back and change our code so that the autonomous code runs “When Autonomous” to pass inspection.
- The game: We were not familiar enough with how the game was really played.
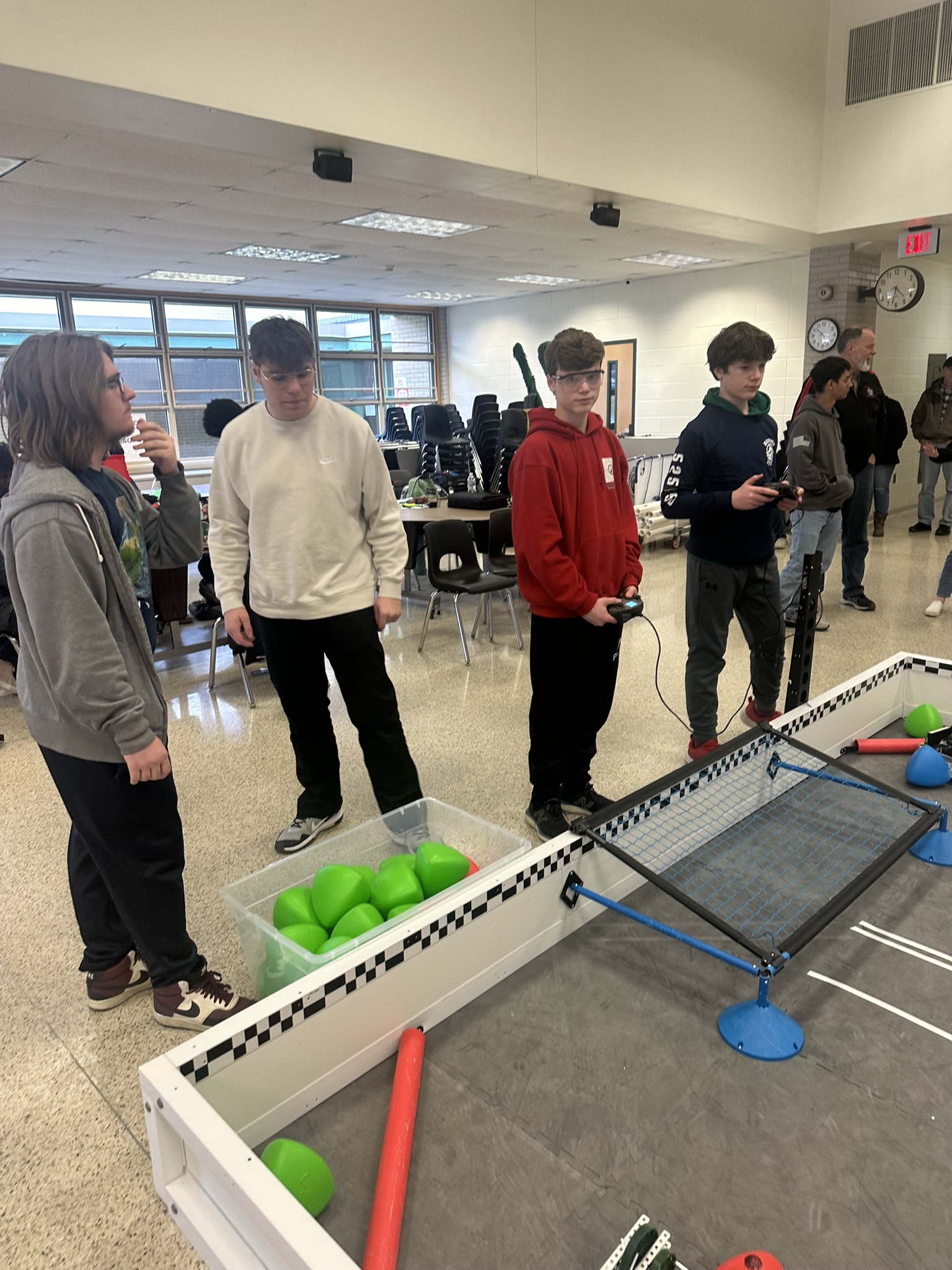
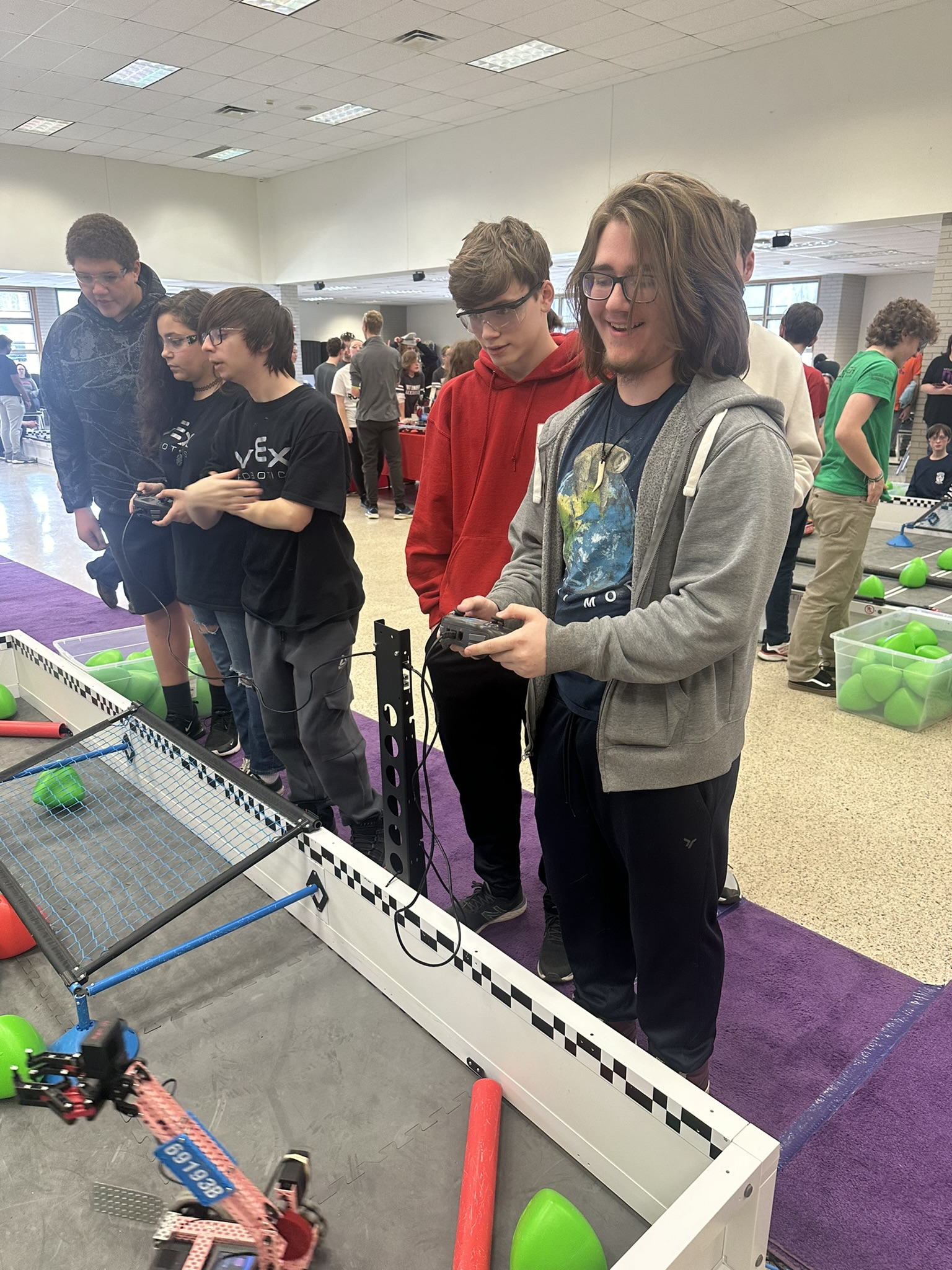
- Launchers: A big component of the most successful robots was the ability to throw the triballs across the field. When each game started, both teams had bins of triballs that could be fed to the robots to launch towards their goal. We did not have the ability to do this and it looked really fun and was a huge component for success. I don’t think any of us realized this was even a component of the game until we actually witnessed it in person.
- Some teams just put a ramp on their robots to roll many triballs down, then just pushed the group to the other side. Some had launchers like trebuchets, and some had wheels that just spun really fast that would throw the balls when they were placed on the wheels. Also, a few teams had parts on their robots to put up and try to block the launchers to play defense if they were on the same side.
- Note on launchers/catapults when considering builds: having a catapult isn’t necessarily the key to success, it’s having a good duo of teams that the robots can work together. For instance; a catapult and something that can push all the balls in easily.
- Climbing: in the last few seconds of each game, if the robots were able to climb in a way to lift themselves completely off the mats, more points were awarded. Most teams just didn’t do this part, but the most successful robots did.
- Autonomous period: at the start of every match was an autonomous period that lasted 15 seconds. Basically the goal was to put a ball in the goal (or pushed to the other side depending on if you started on your teams side or the other teams) with code. I think we may have over thought this one. Most groups more or less just had the robot drive straight. You were allowed to position the robot how you wanted (based on a set starting area) and place a ball anywhere as long as it was touching your robot. We also left a few points on the board by accidentally crossing a center line in the autonomous period, which disqualified us in that portion of the game. I don’t think we knew about that rule until midway of the competition.
- Launchers: A big component of the most successful robots was the ability to throw the triballs across the field. When each game started, both teams had bins of triballs that could be fed to the robots to launch towards their goal. We did not have the ability to do this and it looked really fun and was a huge component for success. I don’t think any of us realized this was even a component of the game until we actually witnessed it in person.
Things to bring
- Safety Goggles
- Laptop for programming (I forgot this in the classroom on Friday, leading to a chaotic night/early Saturday morning)
- Teams should also have their code backed up either on github, or some other online platform. This will make it so we can still access it if the main laptop stops working.
- Spare parts and tools – Just bring them all
- We should get some spare batteries
- After seeing other robots, we should compile a list of other parts to purchase
- Snacks – We got pizza for lunch, but this was a long day. Who doesn’t like snacks!
Looking Forward
Sadly, we got a late start in the VEX season simply because we were waiting for the kits, so this may be our only competition this year. In the remainder of this school year, we should compile and acquire a full list of parts that could be useful, and we should practice (and document) building components/sections of robots (eg. launchers, climbers) just to have ideas in the future. The next game type is expected to be released during VEX world championships (in May?), so hopefully we can get a solid start on building something early in the next school year. We should also try to attended a competition early in the school year just to get familiar with the game and see other types of builds (Frankie said New Castle may host a competition on a Friday early in the season, we should watch for that).
Summary
I could not be more proud of both groups today. They knew they were going to “take their lumps” today and they showed up, performed well, had fun and kept a great attitude throughout. Quite frankly, I’m not one who is usually excited to sacrifice a Saturday, but this was time well spent with people I truly care about. It was a great time and I’m so happy we did it. Nice work ECTS Guinea Pig 1 and Guinea Pig 2! You guys did great!
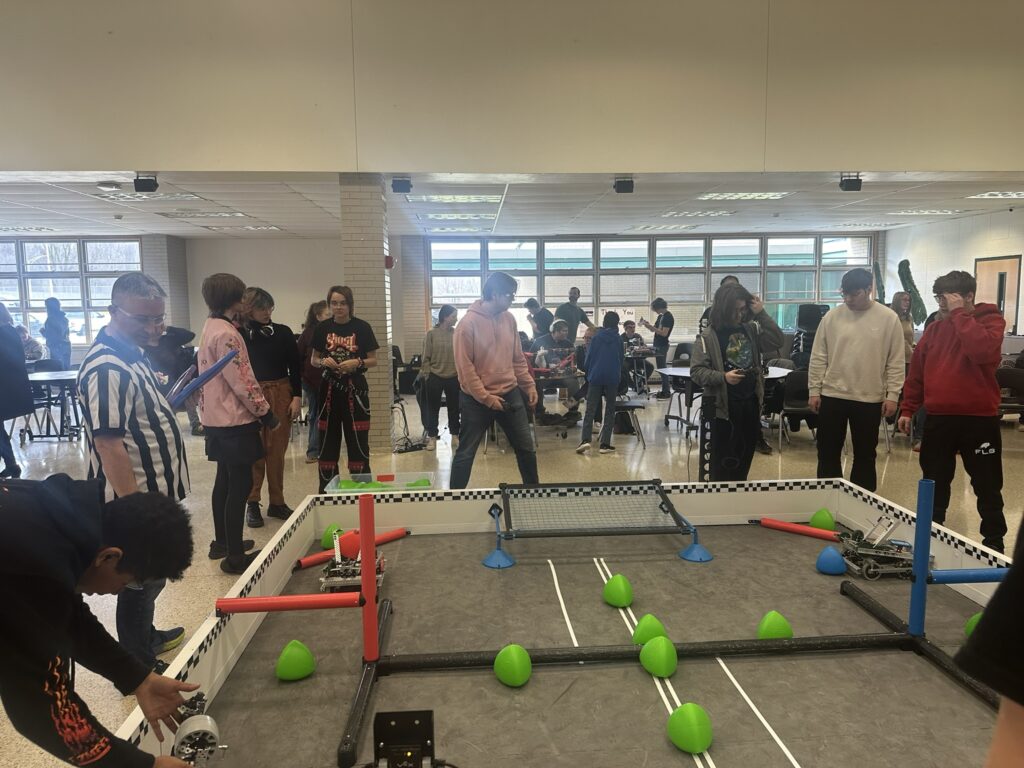
Some pics from the day